The increasing integration of energy and transportation is giving rise to a new level of complexity in emerging mobility systems, such as connected and automated vehicles (CAVs), shared mobility, etc. In this project, control systems technologies were developed to reduce energy consumption, greenhouse gas emissions, travel delays, and improve safety of a CAV.
Emerging mobility systems provide the most intriguing opportunity for enabling users to better monitor transportation network conditions and make better decisions for improving safety and transportation efficiency. This project will consolidate emerging mobility systems and modes with real-world data and processed information leading to an equitable transportation system with broad economic, environmental, and societal benefits.
This project will synergistically integrate human-driving behavior with control theory and learning in developing data-driven approaches that will enable a transformative new functionality of connected and automated vehicles to interact with human-driven vehicles safely and efficiently.
The research objectives of this project are to use the Information and Decision Science Lab Scaled Smart City (IDS3C), a 1:25 research and educational scaled robotic testbed that is capable of replicating different real-world urban traffic scenarios, to develop novel approaches in autonomous driving systems aimed at creating new features in Mathworks’ related products.
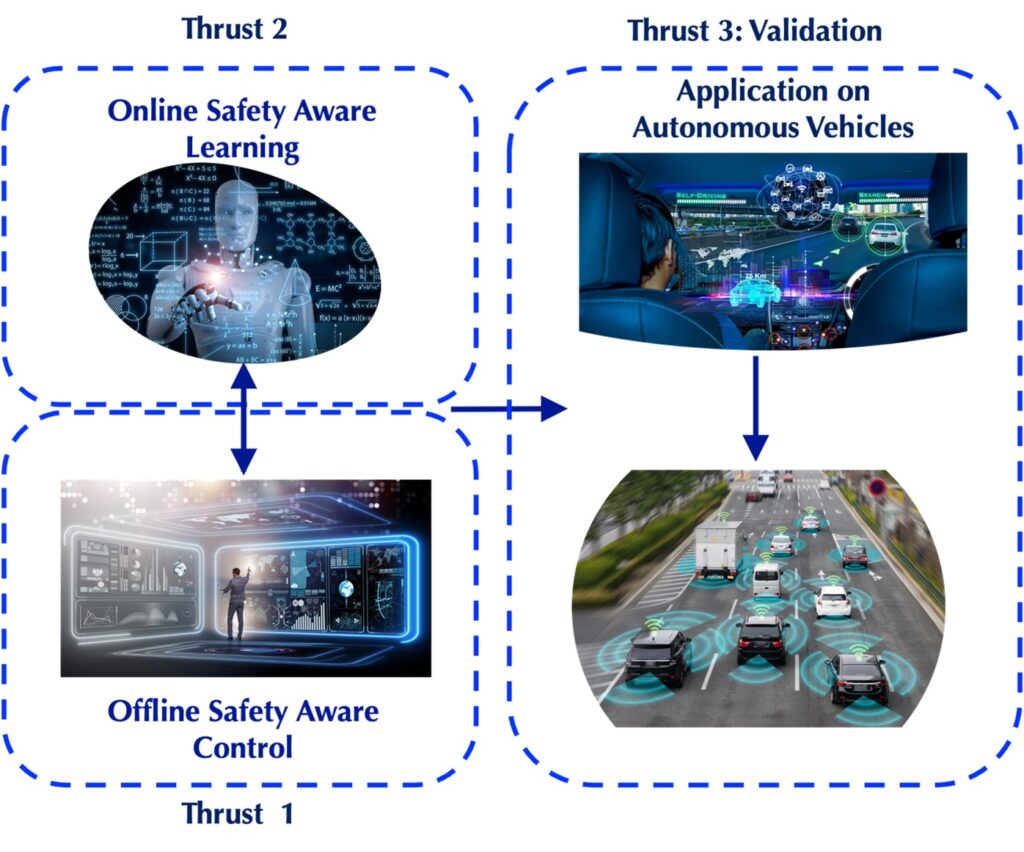
The overarching goal of the proposed project is to establish a framework that leads to the design and implementation of learning-enabled systems in which safety is ensured with high levels of confidence. The framework will leverage tools from control theory, multi-agent autonomy, and formal methods for rigorously probabilistic reasoning to yield safe learning-enabled systems.