ARPA-E



Simultaneous Optimization of Vehicle and Powertrain Operation Using Connectivity and Automation
Sponsor: ARPAE NEXTCAR Program
Total Budget: $4,196,481
Principal Investigator (PI):
Prof. Andreas Malikopoulos, Cornell University
Co-PIs:
- Christos Cassandras, Boston University
- Huei Peng, University of Michigan
- Jackeline Rios-Torres, Oak Ridge National Laboratory
- Shyam Jade, Bosch
Project Description
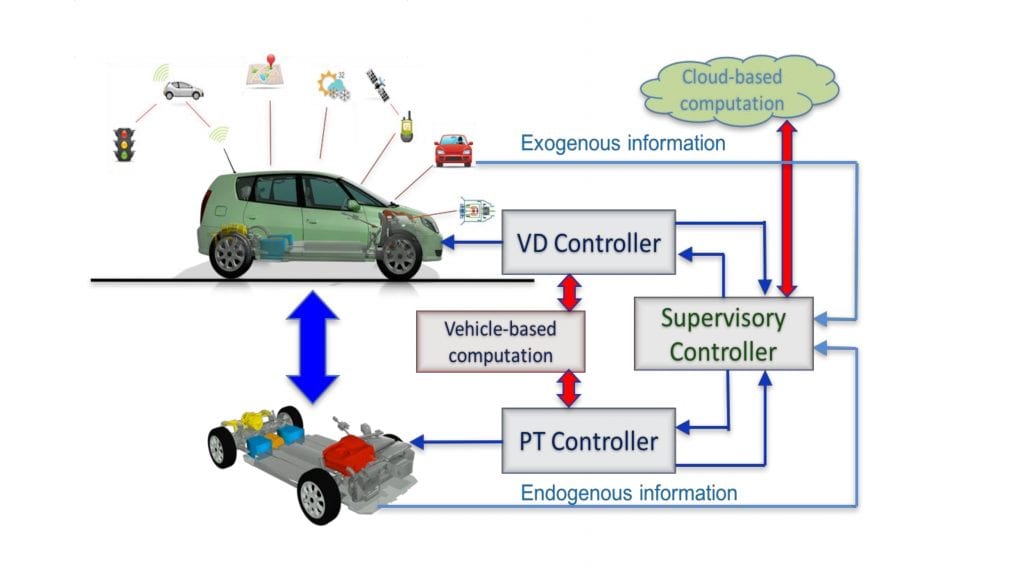
The overarching goal of this project is to develop and implement the control technologies aimed at maximizing the energy efficiency of a 2016 Audi A3 e-tron plug-in hybrid electric vehicle (PHEV) without degradation in tailpipe out exhaust emission levels, and without sacrificing the vehicle’s drivability, performance, and safety. These technologies will exploit connectivity between vehicles and the infrastructure to optimize concurrently vehicle-level and powertrain-level operations. We develop a two-level control architecture to: (1) optimize the vehicle’s speed profile aimed at minimizing (ideally, eliminating) stop-and-go driving, and (2) optimize the powertrain of the vehicle for this optimal speed profile obtained under (1). These control technologies will consist of a vehicle dynamic (VD) controller, a powertrain (PT) controller, and a supervisory controller. The supervisory controller will (1) oversee the VD and PT controllers, (2) communicate the endogenous and exogenous information appropriately, (3) compute the optimal routing for any desired origin-destination, (4) determine the regions where electric driving will have the major impact and derive a desired battery state-of-charge trajectory, and (5) synthesize a description of the upcoming road segment from the exogenous information and communicate it to the VD controller. The VD controller will optimize online the acceleration/deceleration and speed profile of the vehicle, and thus, torque demand. The PT controller will compute the optimal nominal operation (“set-points”) for the engine, motor, battery, and transmission corresponding to the optimal solution of the VD controller. We will manage the complexity of the problem dimensionality by establishing two parallel and appropriately interacting computational levels: 1) a cloud-based, and 2) a vehicle-based level. The proposed control technologies will be applied to the operation of the vehicle over a range of real-world driving scenarios deemed characteristic of typical commute. At the end of the project, we will deliver the technologies that will revolutionize the way that a vehicle is optimized today and simultaneously achieve the following: 1) compute optimal routing for any desired origin-destination to bypass bottlenecks, accidents, special events, and other conditions that affect traffic flow, 2) accelerate/decelerate optimally based on traffic conditions and the state of the surrounding roads to avoid getting into congestion so that the vehicle will not have to come to a full stop, thereby conserving momentum and improving efficiency, and 3) realize online the optimal efficiency of the powertrain. The long-term potential impact of these technologies is substantial. Energy efficiency will be increased by more than 20%, and thus the market penetration of hybrid electric vehicles and PHEVs will be boosted dramatically with significant implications in reducing oil displacement and greenhouse gas emissions. The expected outcome of this project will promote scientific and technological innovations that will eventually advance the economic and energy security of the U.S, and decrease the dependence on foreign energy sources.
Journal Articles
- Chalaki, B., and Malikopoulos, A.A., “Time-Optimal Coordination for Connected and Automated Vehicles at Adjacent Intersections,” IEEE Trans. Intell. Transp. Syst., Vol. 23, 8, pp. 13330 – 13345, 2022.
- Chalaki, B., and Malikopoulos, A.A., “A Priority-Aware Replanning and Resequencing Framework for Coordination of Connected and Automated Vehicles,” IEEE Control Systems Letters, 6, pp. 1772–1777, 2022.
- Mahbub, A M. I., and Malikopoulos, A.A., “Conditions to Provable System-Wide Optimal Coordination of Connected and Automated Vehicles,” Automatica, 131, 109751, 2021.
- Malikopoulos, A.A., Beaver, L.E., and Chremos, I.V., “Optimal Time Trajectory and Coordination for Connected and Automated Vehicles,” Automatica, 125, p. 109469, 2021.
- Beaver, L. E., and Malikopoulos, A.A., “An Energy-Optimal Framework for Assignment and Trajectory Generation in Teams of Autonomous Agents,” Systems & Control Letters, 138, 2020.
- Mahbub, A M. I., Malikopoulos, A.A., and Zhao, L., “Decentralized Optimal Coordination of Connected and Automated Vehicles for Multiple Traffic Scenarios,” Automatica, 117, p. 108958, 2020.
- Zhao, L., and Malikopoulos, A.A., “Enhanced Mobility with Connectivity and Automation: A Review of Shared Autonomous Vehicle Systems,” IEEE Intelligent Transportation Systems Magazine, 2020.
- Beaver, L. E., Chalaki, B., Mahbub, A M. I., Zhao, L., Zayas, R., and Malikopoulos, A.A., “Demonstration of a Time-Efficient Mobility System Using a Scaled Smart City,” Vehicle System Dynamics, 58, 5, 787–804, 2020.
- Malikopoulos, A.A., Hong, S., Park, B., Lee, J., and Ryu, S., “Optimal Control for Speed Harmonization of Automated Vehicles,” IEEE Trans. Intell. Transp. Syst., 20, 7, 2405–2417, 2019.
- Meng, X., and Cassandras, C.G., “Trajectory Optimization of Autonomous Agents with Spatio-Temporal Constraints”, to appear in IEEE Trans. on Control of Network Systems, 2020.
- Zhang, Y., and Cassandras, C.G., “An Impact Study of Integrating Connected Automated Vehicles with Conventional Traffic”, Annual Reviews in Control, Vol. 48, pp. 347-356, 2019.
- Zhang, Y., Cassandras, C.G., Li, W., and Mosterman, P.J., “A Discrete-Event and Hybrid Traffic Simulation Model Based on SimEvents for Intelligent Transportation System Analysis in Mcity”, J. of Discrete Event Dynamic Systems, Vol. 29, 3, pp. 265-295, 2019.
- Zhang, Y., and Cassandras, C.G., “Decentralized Optimal Control of Connected Automated Vehicles at Signal-Free Intersections Including Comfort-Constrained Turns and Safety Guarantees”, Automatica, Vol. 109, pp. 1-16, 2019.
- Chen, R., and Cassandras, C.G., “Stochastic Flow Models with Delays, Blocking and Applications to Multi-Intersection Traffic Light Control”, J. of Discrete Event Dynamic Systems, Vol. 30, 1, pp. 1-29, 2020.
Conference Proceedings
- Chremos, I.V., and Malikopoulos, A.A., “Design and Stability Analysis of a Shared Mobility Market,” Proceedings of the 2021 European Control Conference, pp. 374–379, 2021.
- Chalaki, B., and Malikopoulos, A.A., “A Hysteretic Q-learning Coordination Framework for Emerging Mobility Systems in Smart Cities,” Proceedings of the 2021 European Control Conference, pp. 16–21, 2021.
- Kumaravel, S.D., Malikopoulos, A. A., and Ayyagari, R., “Decentralized Cooperative Merging of Platoons of Connected and Automated Vehicles at Highway On-Ramps,” Proceedings of 2021 American Control Conference, pp. 2051–2056, 2021.
- Chremos, I.V., and Malikopoulos, A.A., “Social Resource Allocation in a Mobility System with Connected and Automated Vehicles: A Mechanism Design Problem,” Proceedings of the 59th IEEE Conference on Decision and Control, pp. 2642–2647, 2020.
- Beaver, L. E., and Malikopoulos, A.A., “Beyond Reynolds: A Constraint-Driven Approach to Cluster Flocking,” Proceedings of the 59th IEEE Conference on Decision and Control, pp. 208–213, 2020.
- Chalaki, B., Beaver, L. E., Remer, B., Jang, K., Vinitsky, E., Bayen, A., and Malikopoulos, A.A., “Zero-Shot Autonomous Vehicle Policy Transfer: From Simulation to Real-World via Adversarial Learning,” 16th IEEE International Conference on Control & Automation (IEEE ICCA 2020), pp. 35–40, 2020 – Best Student Paper (finalist).
- Chalaki, B., Beaver, L. E., and Malikopoulos, A.A., “Experimental Validation of a Real-Time Optimal Controller for Coordination of CAVs in a Multi-Lane Roundabout,” Proceedings of IEEE Intelligent Vehicles Symposium– IV2020, pp. 504–509, 2020.
- Chremos, I.V., Beaver, L. E., and Malikopoulos, A.A., “A Game-Theoretic Analysis of the Social Impact of Connected and Automated Vehicles,” Proceedings of 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, pp. 2214–2219, 2020.
- Dave, A., and Malikopoulos, A.A., “Structural Results for Decentralized Stochastic Control with a Word-of-Mouth Communication” Proceedings of 2020 American Control Conference, pp. 2796–2801, 2020.
- Mahbub, A M., I., and Malikopoulos, A.A., “Conditions for State and Control Constraint Activation in Coordination of Connected and Automated Vehicles,” Proceedings of 2020 American Control Conference, pp. 436–441, 2020.
- Mahbub, A M. I., Malikopoulos, A.A., and Zhao, L., “Impact of Connected and Automated Vehicles in a Corridor,” Proceedings of 2020 American Control Conference, pp. 1185–1190, 2020.
- Beaver, L. E., Kroninger, C., Malikopoulos, A.A., “An Optimal Control Approach to Flocking,” Proceedings of 2020 American Control Conference, pp. 683–688, 2020.
- Mahbub, A M. I., Malikopoulos, A. A., “Concurrent Optimization of Vehicle Dynamics and Powertrain Operation Using Connectivity and Automation,” SAE Technical Paper 2020-01-0580, 2020.
- Mahbub, A M. I., Karri, V., Parikh, D., Jade, S., Malikopoulos, A. A., “A Decentralized Time- and Energy-Optimal Control Framework for Connected Automated Vehicles: From Simulation to Field Test,” SAE Technical Paper 2020-01-0579, 2020.
- Beaver, L. E., and Malikopoulos, A.A., “A Decentralized Control Framework for Energy-Optimal Goal Assignment and Trajectory Generation,” Proceedings of the 58th IEEE Conference on Decision and Control, 2019 pp. 879–884, 2019.
- Malikopoulos, A.A., and Zhao, L., “Optimal Path Planning for Connected and Automated Vehicles at Urban Intersections,” Proceedings of the 58th IEEE Conference on Decision and Control, 2019, pp. 1261–1266, 2019.
- Dave, A., and Malikopoulos, A.A., “Decentralized Stochastic Control in Partially Nested Information Structures” Proceedings of the 8th IFAC Workshop on Distributed Estimation and Control in Networked Systems, 52, 20, pp. 97–102, 2019.
- Chalaki, B., and Malikopoulos, A.A., “An Optimal Coordination Framework for Connected and Automated Vehicles in two Interconnected intersections,” Proceedings of 2019 IEEE Conference on Control Technology and Applications, pp. 888–893, 2019.
- Zhao, L., Malikopoulos, A.A., and Rios-Torres, J., “On the Traffic Impacts of Optimally Controlled Connected and Automated Vehicles,” Proceedings of 2019 IEEE Conference on Control Technology and Applications, pp. 882–887, 2019.
- Zhao, L., Mahbub, A M., I., and Malikopoulos, A.A., “Optimal Vehicle Dynamics and Powertrain Control for Connected and Automated Vehicles,” Proceedings of 2019 IEEE Conference on Control Technology and Applications, pp. 33–38, 2019.
- Remer, B., and Malikopoulos, A.A., “The Multi-objective Dynamic Traveling Salesman Problem: Last Mile Delivery with Unmanned Aerial Vehicles Assistance,” Proceedings of 2019 American Control Conference, pp. 5304–5309, 2019.
- Malikopoulos, A.A., and Zhao, L., “A Closed-Form Analytical Solution for Optimal Coordination of Connected and Automated Vehicles,” Proceedings of 2019 American Control Conference, pp. 3599–3604, 2019.
- Mahbub, A M., I., Zhao, L., Assanis, D, D., and Malikopoulos, A.A., “Energy-Optimal Coordination of Connected and Automated Vehicles at Multiple Intersections,” Proceedings of 2019 American Control Conference, pp. 2664–2669, 2019.
- Zhao, L., and Malikopoulos, A.A., “Decentralized Optimal Control of Connected and Automated Vehicles in a Corridor,” Proceedings of 2018 IEEE 21th International Conference on Intelligent Transportation Systems, pp. 1252–1257, 2018.
- Assanis, D, D., Zhao, L., and Malikopoulos, A.A., “Characterization of the new Class of Driving Cycles for Connected and Automated Vehicles,” Proceedings of 2018 IEEE 21th International Conference on Intelligent Transportation Systems, pp. 3668–3673, 2018.
- Zhao, L., Malikopoulos, A.A., Rios-Torres, J., “Optimal Control of Connected and Automated Vehicles at Roundabouts: An Investigation in a Mixed-Traffic Environment,” Proceedings of the 15th IFAC Symposium on Control in Transportation Systems (CTS 2018), pp. 73–78, 2018.
- Stager, A., Bhan, L., Malikopoulos, A.A., Zhao, L., “A Scaled Smart City for Experimental Validation of Connected and Automated Vehicles,” Proceedings of the 15th IFAC Symposium on Control in Transportation Systems (CTS 2018), pp. 130–135, 2018.
- Zhang, Y., and Cassandras, C.G., “The Penetration Effect of Connected Automated Vehicles in Urban Traffic: an Energy Impact Study”, Proc. of 2018 IEEE Conference on Control Technology and Applications, pp. 620-625, 2018.
- Houshmand, A., and Cassandras, C.G., “Eco-Routing of Plug-In Hybrid Electric Vehicles in Transportation Networks”, Proc. of 21st IEEE Intl. Conference on Intelligent Transportation Systems, pp. 1508-1513, 2018.
- Zhang, Y., and Cassandras, C.G., “A Decentralized Optimal Control Framework for Connected Automated Vehicles at Urban Intersections with Dynamic Resequencing”, Proc. of 57th IEEE Conference on Decision and Control, pp. 217-222, 2018.
- Meng, X., and Cassandras, C.G., “Optimal Control of Autonomous Vehicles for Non-Stop Signalized Intersection Crossing”, Proc. of 57th IEEE Conference on Decision and Control, pp. 6988-6993, 2018.
- Xiao, W., Belta, C. and Cassandras, C.G., “Decentralized Optimal Merging at an Intersection: a Control Barrier Function Approach”, Proc. of 10th ACM/IEEE Intl. Conference on Cyber-Physical Systems, pp. 270-279, 2019.
- Meng, X., and Cassandras, C.G., “A Real-Time Optimal Eco-driving for Autonomous Vehicles Crossing Multiple Signalized Intersections”, Proc. of 2019 American Control Conference, pp. 3593-3598, 2019.
- Xiao, W., and Cassandras, C.G., “Decentralized Optimal Merging Control for Connected and Automated Vehicles”, Proc. of 2019 American Control Conference, pp. 3315-3320, 2019.
- Xiao, W., and Cassandras, C.G., “Decentralized Merging Control in Traffic Networks with Noisy Vehicle Dynamics: a Joint Optimal Control and Barrier Function Approach”, Proc. of 22nd IEEE Intl. Conference on Intelligent Transportation Systems, pp. 3162-3167, 2019.
- Swaszek, R., and Cassandras, C.G., “Load Balancing in Mobility-on-Demand Systems: Reallocation Via Parametric Control Using Concurrent Estimation”, Proc. of 22nd IEEE Intl. Conference on Intelligent Transportation Systems, pp. 2148-2153, 2019.
- Houshmand, A., Wollenstein, S., and Cassandras, C.G., “The Penetration Rate Effect of Connected and Automated Vehicles in Mixed Traffic Routing”, Proc. of 22nd IEEE Intl. Conference on Intelligent Transportation Systems, pp. 1755-1760, 2019.
- Salazar, M., Houshmand, A., Cassandras, C.G., and Pavone, M., “Optimal Routing and Energy Management Strategies for Plug-in Hybrid Electric Vehicles”, Proc. of 22nd IEEE Intl. Conference on Intelligent Transportation Systems, pp. 733-739, 2019.
- Chen, R., Cassandras, C.G., and Tahmasbi-Sarvestani, A., “Time and Energy-Optimal Lane Change Maneuvers for Cooperating Connected and Automated Vehicles”, Proc. of 58th IEEE Conference on Decision and Control, pp. 2220-2225, 2019.
- Zhang, Y., and Cassandras, C.G., “Joint Time and Energy-Optimal Control of Connected Automated Vehicles at Signal-Free Intersections with Speed-Dependent Safety Guarantees”, Proc. of 58th IEEE Conference on Decision and Control, pp. 329-334, 2019.
- Xiao, W., and Cassandras, C.G., “Conditions for Improving the Computational Efficiency of Decentralized Optimal Merging Controllers for Connected and Automated Vehicles”, Proc. of 58th IEEE Conference on Decision and Control, pp. 3158-3163, 2019.
- Xiao, W., and Cassandras, C.G., “Decentralized Optimal Merging Control for Connected and Automated Vehicles with Optimal Dynamic Resequencing”, to appear in Proc. of 2020 American Control Conference, 2020.
- Chen, R. and Cassandras, C.G., “Optimization of Ride Sharing Systems Using Event-driven Receding Horizon Control”, to appear in Proc. of 2020 Intl. Workshop on Discrete Event Systems, 2020.
- Shieh, T. Ersal and H. Peng, “Pulse-and-Glide Operation for Parallel Hybrid Electric Vehicles with Step-Gear Transmission in Automated Car-Following Scenario with Ride Comfort Consideration,” 2019 American Control Conference, Philadelphia, PA, USA, 2019, pp. 959-964.
- Shieh, T. Ersal and H. Peng, “Synchronization of Pulse-and-Glide Operation in Vehicle Platooning using Cooperative Adaptive Cruise Control,” 2020 American Control Conference, Denver, CO, USA, 2020.
- Li, S. Xu, H. Peng, “Eco-routing for Plug-in Hybrid Electric Vehicles,” 2020 IEEE International Conference on Intelligent Transportation Systems, Rhodes, Greece, 2020.
Website Featuring Project Work Results:
Awards
- 2019 IEEE ITS Young Researcher Award: