NSF CPS
Collaborative Research: CPS: Medium: An Online Learning Framework for Socially Emerging Mixed Mobility
Principal Investigator (PI):
Prof. Andreas Malikopoulos, Cornell University
Co-PIs:
- Christos Cassandras, Boston University
- Cathy Wu, MIT
Project Description
Emerging mobility systems, e.g., connected and automated vehicles and shared mobility, provide the most intriguing opportunity for enabling users to better monitor transportation network conditions and make better decisions for improving safety and transportation efficiency. However, different levels of vehicle automation in the transportation network can significantly alter transportation efficiency metrics (travel times, energy, environmental impact). Moreover, we anticipate that efficient transportation might alter human travel behavior causing rebound effects, e.g., by improving efficiency, travel cost is decreased, hence willingness-to-travel is increased. The latter would increase overall vehicle miles traveled, which in turn might negate the benefits in terms of energy and travel time. The project will consolidate emerging mobility systems and modes with real-world data and processed information leading to an equitable transportation system with broad economic, environmental, and societal benefits. We expect the outcome of this project to enhance our understanding of the rebound effects, changes in travel demand and capacity, human reception, adoption, and use of emerging mobility systems.
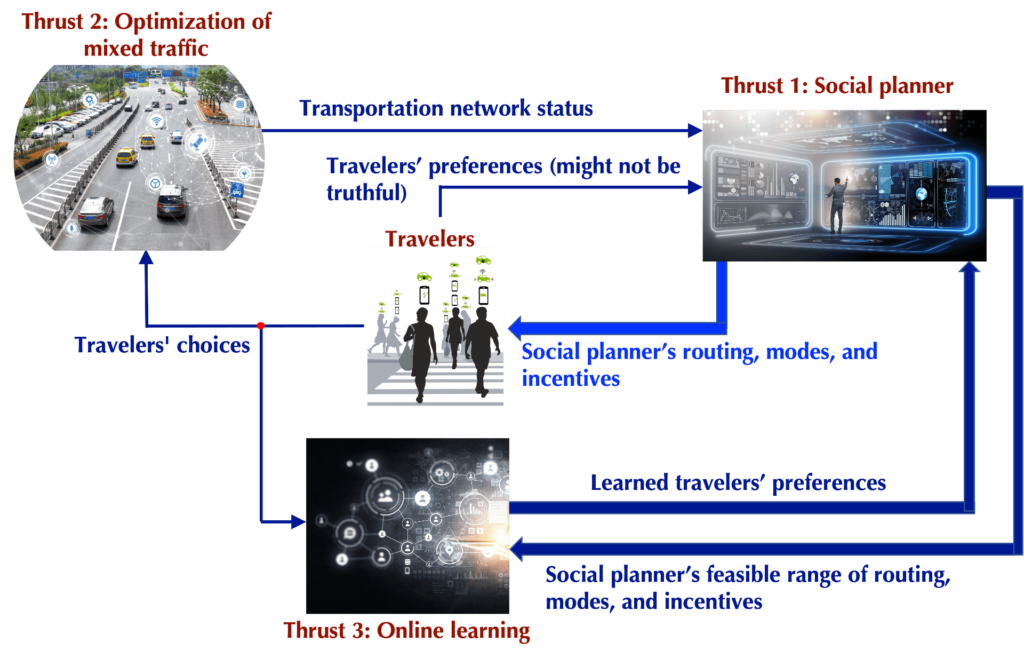
The outcome of this research will deliver an online learning framework that will aim at distributing travel demand in a given transportation network resulting in a socially-optimal mobility system that travelers would be willing to accept. A “socially-optimal mobility system” is defined as a mobility system that (1) is efficient (in terms of energy consumption and travel time), (2) does not cause rebound effects, and (3) ensures equity in transportation. The framework will establish new approaches in optimally controlling cyber-physical systems by merging learning and control approaches. It includes the development of new methods to enhance accessibility, safety, and equity in transportation and travelers’ acceptance. In the context of the proposed framework, a “social planner” faces the problem of aggregating the preferences of the travelers into a collective, system-wide decision when the private information of the travelers is not publicly known. Mechanism design theory will be used to derive the optimal routes and the selection of a transportation mode for all travelers so as to maximize accessibility, safety, and equity in transportation and travelers’ acceptance. Online learning algorithms for contextual bandit problems will be developed to identify traveler preferences and to determine how they would respond to the social planner’s recommendations on routing and selection of a transportation mode.
Evaluation and Experimental Plan
The proposed framework will be implemented and validated in:
- A scaled smart city testbed with robotic cars
- A large-scale setting using a virtual, web-based simulation platform (SUMO) that represents the City of Boston